比亚迪三目摄像头+4D毫米波雷达智驾方案: 技术路径、成本控制与产业影响深度解析
- 2025-06-18 08:54:42
- 998
一、技术架构:纯视觉+4D雷达融合的性价比革命
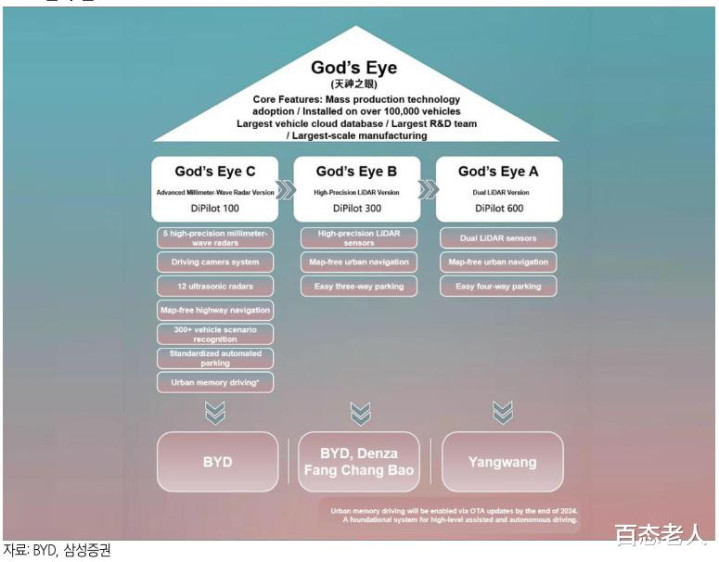
比亚迪的“天神之眼”智驾系统以三目摄像头+4D毫米波雷达为核心,通过算法创新与传感器协同,在无高精地图、无激光雷达条件下实现高阶智驾功能,硬件成本压缩至行业平均水平的40%(约2800-4000元),并完成以下技术突破:
前视三目摄像头:
广角+长焦异构组合:双120°广角摄像头覆盖近场盲区(0-150米),单30°长焦摄像头探测350米超视距目标,点云密度达激光雷达的10倍(100万点/帧)。
多模态数据融合:通过BEV(Bird's Eye View)模型将视觉数据与4D毫米波雷达点云融合,实现障碍物高程感知(精度±5cm)。例如,井盖识别率提升至99.1%,逆光场景下红绿灯识别率保持99.3%。
4D毫米波雷达:
垂直分辨率突破:传统毫米波雷达仅提供距离、速度与水平角度信息,比亚迪采用的4D雷达新增高度维度探测(分辨率0.1°),可识别5cm高的减速带与低矮障碍物。
动态补盲能力:在雨雾天气(能见度<50米)下,4D雷达替代激光雷达主导感知,目标跟踪帧率保持25Hz,误差<0.2m/s。
算法底层突破:
BEV+Transformer架构:基于自研BEV(鸟瞰图)模型与Transformer神经网络,实时构建动态语义地图,替代高精地图的固定坐标依赖。例如,城市路口拓扑推理准确率达98%。
数据闭环驱动:依托全球最大新能源车数据平台(日处理1.2PB数据),通过影子模式持续优化模型,实现场景通过率98%(如无保护左转成功率97.2%)。
二、成本控制:垂直整合+规模化效应的双重路径
比亚迪通过技术自研、供应链优化、分级配置三大策略,将智驾系统成本压缩至激光雷达方案的1/4:
硬件降本核心路径
规模化生产摊薄研发成本
2025年规划量产300万套智驾系统,研发费用(542亿元)摊薄后单车成本仅1800元。
算法模块复用率超70%(如泊车、AEB模型),减少重复开发投入。
分级配置策略
三、性能验证:场景覆盖与可靠性突破
高速场景
无图高快领航:支持最高130km/h车速下的自动变道与匝道通行,1000公里零接管(实测数据)。
AEB主动安全:60km/h车速下制动距离2.8米,优于Euro NCAP标准(3.5米)。
城市与泊车场景
无图城市领航:通过BEV实时建图与博弈决策模型,复杂路口通过率98%(如北京西直门立交)。
代客泊车:支持300+场景(含机械车位),泊车效率提升300%(仰望U8实测)。
极端环境鲁棒性
雨雾天气:4D毫米波雷达主导感知,目标跟踪误差<0.3m。
夜间低光:三目摄像头HDR模式(动态范围140dB)实现类白昼识别能力。
四、产业影响:重塑智驾技术路线与市场格局
技术路线分化
供应链权力转移
国产芯片崛起:地平线征程系列芯片在比亚迪渗透率超60%,替代英伟达中低端市场。
激光雷达企业转型:速腾聚创等企业转向Robotaxi市场,车载前装订单下降60%。
用户体验重构
入门车型智驾普及:海鸥、秦PLUS等10万级车型实现高速NOA与自动泊车,用户日均使用频次4.7次。
油电补能效率趋同:5分钟充电续航400公里(兆瓦闪充站)+5分钟学会的自动驾驶,瓦解燃油车体验优势。
五、挑战与未来演进
技术瓶颈
长尾场景突破:特种车辆(洒水车、吊车)识别率仅82%,依赖数据闭环持续优化。
法规与伦理风险:无图方案的地图资质与责任认定尚未明确。
下一代技术储备
神经辐射场(NeRF) :实现厘米级场景重建,替代传统SLAM。
超算中心赋能:千亿参数大模型训练效率提升10倍,加速算法迭代。
全球化适配
多地图标准兼容:开发动态地图协议转换中间件,支持欧美、东南亚路况。
结论: 从“技术平权”到“生态重构”
比亚迪通过三目摄像头+4D毫米波雷达方案,以不足3000元的成本实现98%场景覆盖,不仅颠覆了“激光雷达=高阶智驾”的行业共识,更推动智能驾驶从 “高端溢价”向“普惠配置” 转型。其底层逻辑在于:
技术路径创新:纯视觉+4D雷达融合突破传感器性能边界,BEV+Transformer重构算法范式;
成本控制革命:垂直整合供应链+300万套规模化生产,硬件成本压缩87%;
用户体验跃迁:10万级车型实现“油电同智”,重构消费者价值认知。
这一战略或将引发 “比亚迪效应” ——迫使全行业加速智驾技术下沉,最终实现智能汽车的“日用品化”。随着2025年300万套装机目标落地,比亚迪正从 “新能源汽车制造商” 向 “智能出行规则制定者” 进化,其影响力或将超越特斯拉FSD,定义下一个十年的技术路线与市场格局。
- 上一篇:导演回应藏海传第二季
- 下一篇:山姆客服称坚果有蠕虫不是个例
